Синхронный, асинхронный
Содержание:
- Принцип действия и устройство синхронного двигателя
- Определение и принцип действия
- Конструкция мотора
- Плюсы и минусы синхронных альтернаторов
- Принципы работы
- Синхронный и асинхронный двигатель отличия
- Устройство СГ
- Комплектующие элементы
- 7.3.1. Усройство и принцип действия синхронного электродвигателя.
- Заключение
Принцип действия и устройство синхронного двигателя
Название синхронные относится к электрическим машинам переменного тока, в которых ротор и магнитное поле статора вращаются с одной и той же скоростью, т.е. синхронно.
Как и все электрические машины синхронные машины обратимы и могут работать как в режиме генератора, так и в режиме двигателя. Трехфазные синхронные машины это обычно машины большой мощности.
По устройству статора синхронная машина не отличается от асинхронной. Обмотка статора обычно соединяется звездой. Отличие синхронной машины от асинхронной заключается в различной конструкции ротора.
Ротор синхронной машины представляет собой постоянный магнит. В машинах средней и большой мощности ротор превращается в постоянный магнит с помощью электрического тока, т.е. это электромагнит. Для этого на роторе располагается отдельная обмотка (сосредоточенная), которая называется обмоткой возбуждения, по ней протекает постоянный ток, который называется током возбуждения. Обмотка ротора вращается вместе с ротором, поэтому требуется устройство подвода тока. На роторе располагается 2 медных кольца, к которым подсоединены выводы обмотки ротора, к неподвижной части крепятся графитовые щетки в щеткодержателях, эти щетки скользят по кольцам, обеспечивая контакт.
Источник постоянного тока, служащий для создания тока возбуждения обычно называется возбудителем. В качестве возбудителя используется генератор постоянного тока, генератор переменного тока с выпрямителем, полупроводниковый выпрямитель управляемый или не управляемый.
По конструкции ротора синхронные машины делятся на два типа:
· машины, имеющие ротор с неявно выраженными полюсами, в этом случае ротор имеет вид гладкого цилиндра.
· синхронные машины, имеющие ротор с явно выраженными полюсами. Такой ротор делается в тихоходных машинах с большим числом пар полюсов.
Формула электромагнитного момента такая же как и для асинхронного двигателя:
Синхронный двигатель, как и асинхронный имеет физическое ограничение по моменту. Если к валу ротора приложить тормозной момент, то двигатель его преодолеет, но оси полюсов ротора и статора разойдутся на некоторый угол.
Изобразим условно вращающееся магнитное поле в виде магнита.
При увеличении момента сопротивления увеличивается угол расхождения полюсов ротора и статора.
Обычно угол Θ берут ≤ 30°, поэтому перегрузочная способность синхронного двигателя: больше чем у асинхронного двигателя.
Перегрузочную способность можно изменить воздействуя на ток возбуждения увеличивая ток возбуждения Iв увеличивается магнитный поток Ф. увеличивается ЭДС E и увеличивается максимальный момент Mмакс .
Механическая характеристика синхронного двигателя абсолютно жесткая, при любом моменте сопротивления скорость его вращения одна и та же. Если Mс ≥ Mмакс. двигатель такой момент не преодолеет и остановится.
185.154.22.117 studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам.
Главная | О нас | Обратная связь
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
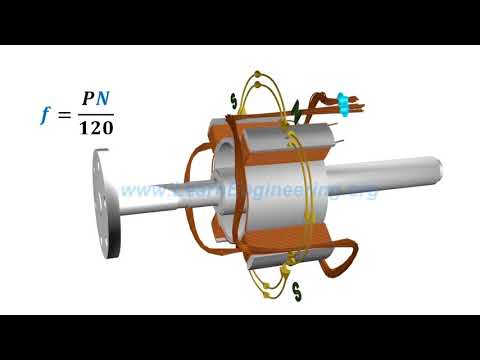
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
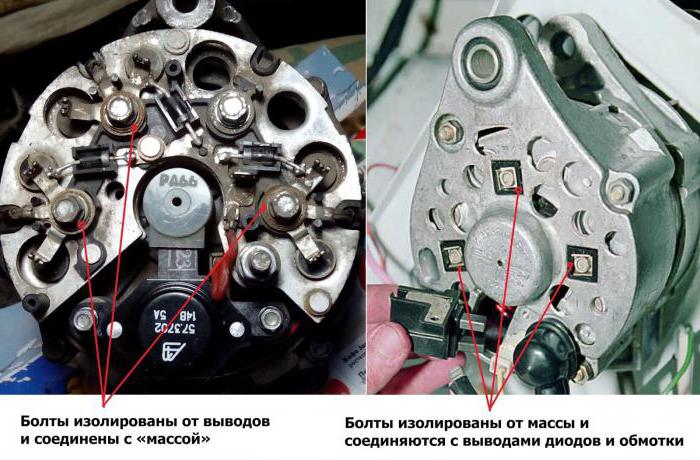
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
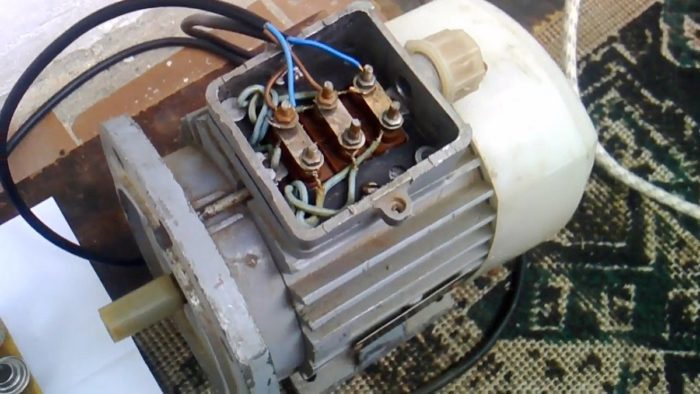
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Плюсы и минусы синхронных альтернаторов
Качественные СА должны комплектоваться медной, а не слабой алюминиевой обмоткой (будьте внимательны: некоторые производители таким образом пытаются снизить расходы на производство). Именно качественная обмотка и щеточный механизм обеспечивают равномерность тока на выходе (с отклонением не более 5 %), позволяют легко переносить повышенные нагрузки при запуске и непродолжительные колебания напряжения.
Чистый электроток очень важен для таких высокочувствительных пользователей, как ноутбуки, компьютеры, принтеры, телефоны, лабораторное и медицинское оборудование. И даже для такой привычной бытовой техники, как холодильники, ТВ, стиральные машинки также предпочтительным будет электроток, вырабатываемый синхронным генератором. Кроме того, только к щеточным ИБП можно подключать АВР (автоматический ввод резерва).
Итак, к неоспоримым плюсам щеточного узла и медной обмотки СА отнесем:
- стабильность напряжения;
- качественный электроток;
- надежность в работе.
При этом постоянное движение щеток способствует чрезмерному нагреву генератора. Применяющаяся в СА воздушная система охлаждения с вентилятором в целом достаточно надежна, но имеет существенный недостаток – эффект пылесоса. Активное втягивание вовнутрь пыли, грязи, влаги часто становится причиной неполадок в системе.
Но прогресс не стоит на месте, и сегодня ведущие производители находят все новые способы защиты оборудования от внешних факторов.
Выбирая генератор, обязательно интересуйтесь, к какому классу защиты он относится.
Минусы щеточных альтернаторов:
- попадание пыли и влаги;
- необходимость периодического техосмотра и замены щеток;
- высокая стоимость;
- создание помех для радиоволн.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
https://youtube.com/watch?v=hU9krurbi0c
Синхронный и асинхронный двигатель отличия
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий магнитное поле статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. Трехфазные асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора
В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
electric-220.ru
Устройство СГ
Принцип работы УЗО
Статор СГ имеет почти такое же устройство и принцип функционирования, как и у асинхронного варианта. Его железные компоненты компилируются из стальных пластин (сталь применяется электротехнического назначения), которые отделаются друг от друга слоями изоляции. Обмотка переменного электротока располагается в его пазах. Провода обмоток отделяются друг от друга изолирующим слоем и закрепляются надежно, так как через них вводится нагрузка. Ротор может исполняться без выпирающих полюсов либо с ярко выраженными полюсами.
На заметку. Наибольшую популярность имеет трехфазный синхронный генератор, применяемый во многих областях жизнедеятельности человека и предприятий. Однофазные варианты обычно применяется в быту.
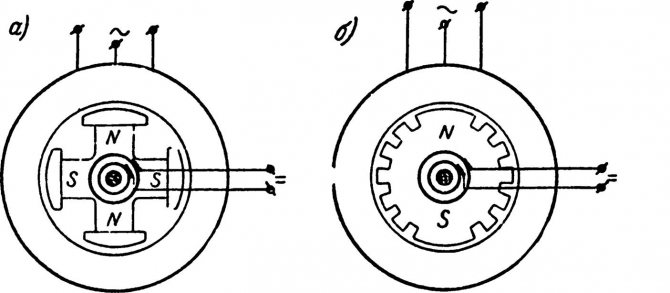
Основные типы СГ: а – с ротором, у которого выступают полюса; б – с не явно полюсным ротором
Синхронные генераторы с явно полюсным ротором производятся для тихоходных машин, к примеру, для установок с гидротурбинами. А СГ с не явно полюсными роторами подходят для механизмов переменного тока, вращающихся с высокой скоростью.
Синхронные генерирующие устройства могут работать в двух режимах: двигательном либо генерирующем переменный электроток
Здесь важно то, какой метод охлаждения применяется, так как генерация чего-либо всегда более требовательна. В основном, на вал монтируются крыльчатки, какие охлаждают ротор с двух сторон воздухом, проходящем через фильтрующий элемент
Потоки воздуха в такой системе охлаждения вращаются одни и те же. При работе СГ в усиленном режиме подобная система нежелательна.
Важно! Эффективнее при высоких нагрузках применять в качестве охлаждающего агента водород, какой более чем в 14 раз легче воздуха. Внутреннее устройство СГ переменного тока
Внутреннее устройство СГ переменного тока
Обмотки рассматриваемого генератора отводятся концами на его распредкоробку. Трёхфазная машина имеет иное соединение обмотки – отвод совершается звездой или треугольником.
Преимущественно все синхронные генерирующие устройства поддерживают синусоидальное переменное электронапряжение. Этого можно достичь посредством изменения формы наконечников на полюсах и особым месторасположением витков в пазах не явно полюсного ротора.
Комплектующие элементы
Принцип работы и устройство синхронного генератора отличаются тем, что этот агрегат может использоваться в качестве мотора и генератора. Его функциональные возможности позволяют быстро переходить от графика двигателя к графику работы генератора — это во многом зависит от действия тормозящей или вращающей силы оборудования. Такой принцип работы высоко ценится среди квалифицированных специалистов. Стоит отметить, что в графике двигателя в систему входит электрическая энергия, а выходит механическая.
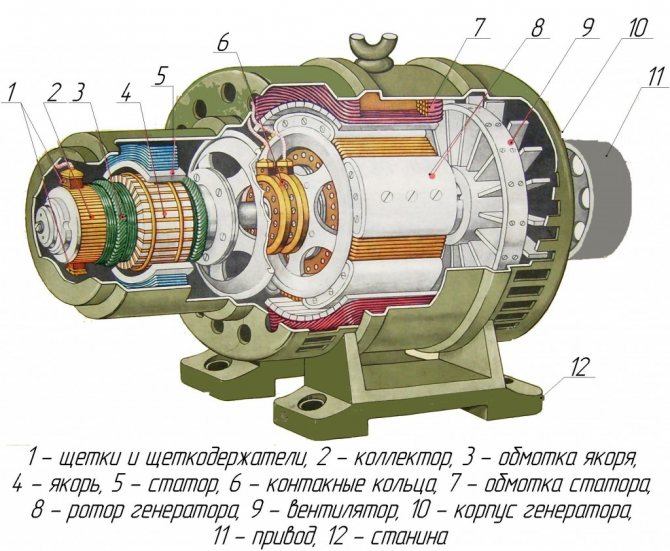
Устройство синхронного генератора включает в себя следующие элементы:
- Высококачественная обмотка устройства.
- Ротор либо индуктор (вращающегося или подвижного типа). В комплекте к этому элементу обязательно прилагается обмотка возбуждения.
- Несколько разновидностей мощных кабелей, способных выдержать большую нагрузку.
- Удобный переключатель статорной катушки.
- Специальный выпрямитель.
- Высококачественная роторная катушка.
- Специальный поставщик постоянного тока, работа которого может контролироваться самим пользователем.
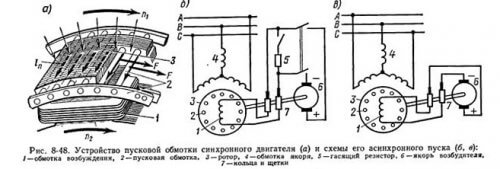
7.3.1. Усройство и принцип действия синхронного электродвигателя.
Характерный признак синхронного
двигателя – вращение ротора с
синхронной частотой n1
=
ƒ160
/pнезависимо от нагрузки на валу. Поэтому
синхронные двигатели используют в
системах автоматики для привода
механизмов, требующих строго стабильной
частоты вращения.
Синхронный двигатель, как и асинхронный,
состоит из неподвижного статора и
вращающегося ротора, разделенных
воздушным зазором (у синхронных двигателей
этот зазор несколько больше). Существуют
конструктивные разновидности исполнения
синхронных двигателей малой мощности,
отличающиеся в основном устройством
ротора: явнополюсные с электромагнитным
возбуждением, явнополюсные с возбуждением
постоянными магнитами, явнополюсные
реактивные (с невозбужден-ным ротором),
неявнополюсные гистерезисные.
Рассмотрим синхронные явнополюсные
двигатели с
электромагнитным возбуждением.
Эти двигатели изготавливаются обычно
мощностью в несколько киловатт и более
и поэтому в устройствах автоматики
широкого применения не получили.
Однако основные положения теории этих
двигателей используются при изучении
синхронных двигателей малой мощности
с возбуждением постоянными магнитами
и других типов.
Для изучения принципа действия синхронного
явнополюсного двигателя с электромагнитным
возбуждением используем модель,
представляющую собой две разделенные
воздушным зазором магнитные системы
с явно выраженными полюсами – внешнюю
1и внутреннюю
2(рис.
6). Если внешняя система полюсов неподвижна,
то благодаря силам магнитного притяжения
внутренняя система полюсов (ротор)
расположится так, что ее полюсы будут
находиться под полюсами внешней системы
противоположной полярности. При этом
силы
FMмагнитного притяжения, действу-ющие
на внутреннюю систему, не будут
создавать электромагнитного момента
(рис. 7,а), так как они направлены
радиально (по оси полюсов).
Если внешнюю систему полюсов вращать
с небольшой частотой n1, то в
начальный момент времени эта система
сместится относительно внутренней
на некоторый угол θ (рис. 7,б). При
этом вектор силы магнитного притяженияFMтакже повернется относительно оси
полюса ротора. Теперь эта сила состоит
из двух составляющих:FM=
Fn
+ Ft
причем нормальная составляющая
Fnнаправлена по оси полюса рото-
— 4 —
ра,
а тангенциальная
Ft–
перпендикулярно оси полюса. Совокупность
составляющих
Ftдействующих
на все полюсы ротора, создает на роторе
электромагнитный вращающий моментМ,
приводящий ротор во вращение с
синхронной частотойn1, т. е.
синхронно вращению внешней системе
полюсов.
Рис.
6. Упрощенная модель синхронного
двигателя:
Рис. 7. Возникновение
электромагнитного
а
– внешняя магнитная система;
момента на роторе синхронного
б
– внутренняя магнитная система.
двигателя.
Трехфазный синхронный двигатель
отличается от рассмотренной модели
тем, что в нем вместо внешней системы
полюсов имеется неявнополюсный
статор с распределенной трехфазной
обмоткой, аналогичный статору
асинхронного трехфазного двигателя.
Ротор синхронного двигателя – явнополюсной
конструкции с электромагнитным
возбуждением. При этом на полюсах ротора
2 располагают
полюсные
катушки
3(рис. 8), которые при последовательном
соединении образуют обмотку возбуждения
(ОВ).
При подключении ОВ к источнику постоянного
тока возникает магнитный поток возбуждения
ФВ, силовые линии которого
сцеплены с обмоткой статора1.
При включении обмотки статора в
трехфазную сеть создается вращающееся
с синхронной частотойn1магнитное поле с таким же числом
полюсов, как на роторе. Благодаря
взаимодействию полей статора и ротора
возникает электромагнитный момент,
вращающий ротор ссин-хронной
частотой. В результате электрическая
энергия сети преобразуется в механическую
энергию вращения.
Предположим, что ротор двигателя враща-
Рис.
8.
Магнитная система явнополюсногоется с частотой, отличающейся
от частоты
синхронного
двигателя (2р
= 4): вращения
поля статора, тогда в некоторые
1
– обмотка статора; 2
– полюса ротора; моменты
времени возбужденные полюса ро-
3
– полюсные катушки. тора
окажутся под одноименными полюсами
поля статора, возникнут силы магнитного
от-
— 5 —
талкивания
Суммарный электромагнитный момент
станет равным нулю и ротор остановится.
На рис. 9,
апоказана конструкция ротора синхронного
двигателя с явно выраженными полюсами.
Заключение
Концепция использования электроники в составе традиционных роторных двигателей не всегда оправдывается в процессе эксплуатации. Связано это со сферами применения такого оснащения. Чаще всего это традиционные области производства, где совсем не обязательно подключение электронных систем управления. Инновационная начинка заставляет пересматривать производственные циклы, точечно модернизируя технологические процессы. К тому же стоимость двигателя, которая варьируется от 15 до 20 тыс. руб., не добавляет привлекательности этой продукции. Обычные аналоги на контроллерах с электромеханическими реле обходятся дешевле, не говоря о том, что их легче интегрировать в процессе сборки продукции.
И все же появляются направления, в которых высоко ценится именно полупроводниковое управление с датчиками роторов. Как правило, это высокотехнологичное оборудование, выпуском которого занимаются крупные компании. Причем на выходе они предоставляют продукцию разного уровня, в том числе и для бытового применения.